



基于機器視覺的自動包裝破損檢測系統(tǒng)
來源:m.dyhbzj.cn2019年04月01日
摘要:針對目前國內(nèi)食品人工包裝生產(chǎn)線的弊端,提出了一種基于機器視覺與單片機控制的低成本、高效率的智能包裝系統(tǒng)。由工業(yè)相機進行圖像采集,用MATLAB軟件進行目標識別定位,以實現(xiàn)拾取機械手快速分揀與自動包裝。該平臺具有清潔安全、控制簡單、易于調(diào)試、可靠性高等特點,在食品自動化生產(chǎn)領域有一定的市場前景。
關鍵詞:機器視覺;單片機;自動包裝;系統(tǒng)設計
0 引言
現(xiàn)階段,國內(nèi)大多數(shù)食品生產(chǎn)廠家由人工對食品進行分揀,這種作業(yè)方式極易影響食品質(zhì)量,無法保證食品安全性;同時難以避免工人高強度作業(yè)造成的錯裝、漏裝現(xiàn)象,生產(chǎn)率低,成本高。為此,本文利用機器視覺檢測技術設計了一種新型食品包裝平臺,通過MATLAB圖像處理技術對食品進行識別定位,使機械手對無規(guī)則放置的食品快速分揀以剔除缺陷產(chǎn)品,以便進行自動包裝。利用該平臺可保證作業(yè)結(jié)果的準確性,在很大程度上提升生產(chǎn)廠家的經(jīng)濟效益與生產(chǎn)效率。
1、食品自動包裝平臺的工作原理及硬件組成
基于機器視覺的食品包裝平臺最重要的功能是通過圖像處理方式對食品進行識別,圖1為基于機器視覺的食品包裝平臺的工作流程圖。
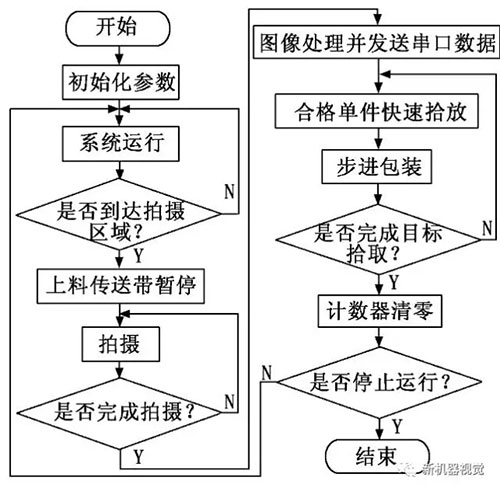
圖1 基于機器視覺的食品包裝平臺的工作流程
無規(guī)則排列的待包裝食品在上料傳送帶上通過拍攝區(qū)域時,工業(yè)相機對其進行拍攝,拍攝結(jié)果經(jīng)PC機進行圖形運算處理抽取目標特征。對于檢測完好的食品,單片機控制拾放機械手對目標快速拾取,并依次排列于枕式包裝機的送料裝置內(nèi)進行自動包裝。檢測到有破損的目標由傳送帶送入廢品回收站,予以剔除。
該包裝平臺整體機械構(gòu)架如圖2所示,包括控制系統(tǒng)、圖像拍攝處理系統(tǒng)和通信接口等??刂葡到y(tǒng)由單片機及其控制下的拾放機械手、上料傳送帶和枕式包裝機組成。圖像拍攝裝置由CCD工業(yè)相機、照明光源組成。圖像處理任務由PC機完成,由MATLAB GUI編寫的控制系統(tǒng)軟件負責通信。
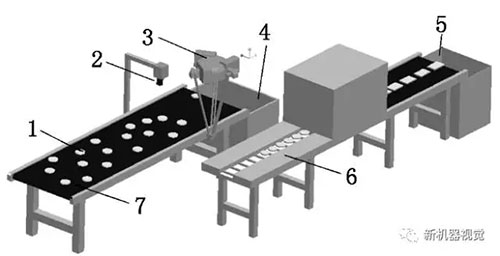
1-待包裝食品;2-工業(yè)相機;3-拾取機械手;4-廢品收集箱;
5-已包裝成品收集箱;6-枕式包裝機;7-上料傳送帶
圖2 包裝平臺整體機械構(gòu)架
2、控制系統(tǒng)
PC機作為該系統(tǒng)的上位機,選用STC89C52RC作為下位機,其內(nèi)部集成的雙全工性異步通信串口可用作UART(通用異步收發(fā)器)。采用RS-232總線進行上、下位機間的串口通信,按照通信協(xié)議設置波特率為9 600,數(shù)據(jù)位為8位,停止位為1位,無奇偶校驗位。
本文采用MATLAB中斷方法操作串口實現(xiàn)通信。限于篇幅文中未給出詳細參數(shù)配置與回調(diào)函數(shù)編程源代碼。利用MATLAB GUI工具搭建了可視化的人機交互界面,如圖3所示,包括參數(shù)設置區(qū)、數(shù)據(jù)編輯區(qū)和圖像拍攝區(qū)。工作人員可對工作狀態(tài)進行實時監(jiān)控,根據(jù)檢測目標、生產(chǎn)任務進行人為參數(shù)調(diào)整。
PC機對圖像進行數(shù)據(jù)格式轉(zhuǎn)換,進而將坐標點數(shù)據(jù)寫入下位機的SBUF緩存器。坐標數(shù)據(jù)經(jīng)主控芯片換算成機械手在X、Y、Z方向的脈沖分量,控制機械手到達準確位置拾取食品。每完成一次拾放,枕式包裝機執(zhí)行一次步進式包裝??刂葡到y(tǒng)框圖如圖4所示。
3、圖像處理系統(tǒng)
近年來MATLAB在圖像處理領域獲得普遍青睞,緣由便在于其簡便的語法結(jié)構(gòu)、強大的可視化處理功能。本文基于MATLAB實現(xiàn)圖像處理的復雜算法(以某品牌蛋類芯餅為例)。
3.1 圖像處理流程
圖像處理流程圖如圖5所示。
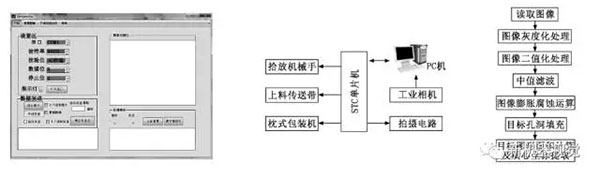
圖3 人機交互界面 圖4 控制系統(tǒng)框圖 圖5 圖像處理流程
3.2 形態(tài)學運算
圖6為圖像處理前、后對比。圖6(a)為實際采樣圖,由于拍攝環(huán)境因素的干擾,實際采樣圖中存在目標邊界模糊、對比度低等問題,故需進行圖像預處理以提高后續(xù)特征抽取的可靠性。圖6(b)為灰度化圖像,此處使用MATLAB軟件在圖像灰度化處理的基礎上,建立像素點灰度分布直方圖,并根據(jù)像素點灰度分布直方圖統(tǒng)計結(jié)果,選取恰當分割值對灰度圖像進行二值化處理(im2bw),顯著改善了目標邊界的對比度,如圖6(c)所示。針對二值化圖像,本文在MATLAB中利用中值濾波(medfilt2)、膨脹(imdilate)腐蝕(imerode)、孔洞填充(imfill)等函數(shù)運算對其進行處理,經(jīng)處理后噪點、光斑被完全過濾且目標邊界清晰,處理效果如圖6(d)所示。
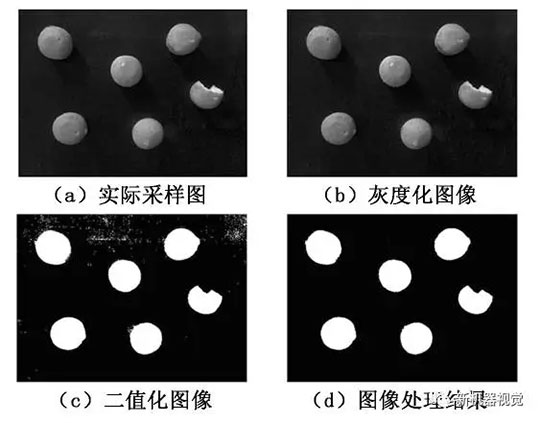
圖6 處理效果對比
3.3 目標及坐標位置提取
為達到剔除破損樣品的目的,要解決的關鍵問題是如何準確獲取目標的位置。對于二值化圖像,MATLAB提供了計算圖形質(zhì)心坐標與前景面積的函數(shù)(regionprops)。此算法首先標記圖像矩陣的各連通區(qū)域,再求取各區(qū)域的前景面積與質(zhì)心坐標;逐一比較各連通區(qū)域前景面積后,排除破損目標(偏離理想面積6%以上)后,對合格目標的質(zhì)心坐標予以提取。檢測結(jié)果通過串行口發(fā)送給單片機控制拾取機械手進行實時分揀。
4、結(jié)論
本文基于MATLAB的圖像圖形處理技術設計了食品智能包裝平臺,與傳統(tǒng)的包裝方式相比,節(jié)約了大量人力和時間,設備具有成本低、效率高等優(yōu)點,能夠代替國內(nèi)部分食品生產(chǎn)廠家的人工生產(chǎn)線,有利于自動化生產(chǎn)。但設計中仍存有不足,如對不同形狀、規(guī)格的樣品如何設計更合理的合格品篩選算法,以提高設備的柔性和剔除精度。
下一條: 基于機器視覺的塑料薄膜破損檢測
