



機(jī)器視覺(jué)與自動(dòng)化中心成立
來(lái)源:m.dyhbzj.cn2021年12月29日熱度:286
【中心簡(jiǎn)介】
機(jī)器視覺(jué)檢測(cè)與自動(dòng)化中心響應(yīng)制造業(yè)轉(zhuǎn)型升級(jí)對(duì)視覺(jué)檢測(cè)與自動(dòng)化技術(shù)的迫切要求而籌建成立,在位置姿態(tài)測(cè)量,表面尺寸測(cè)量,形面質(zhì)量控制,過(guò)程監(jiān)控與測(cè)量等領(lǐng)域可提供技術(shù)服務(wù)和一整套解決方案。
主要研究方向包括:
1、 視覺(jué)計(jì)算方法:?jiǎn)蜗鄼C(jī)位置姿態(tài)測(cè)量,立體視覺(jué),編碼結(jié)構(gòu)光,激光三角法,光場(chǎng)三維重建,偏折術(shù)、視覺(jué)控制等。
2、機(jī)器視覺(jué)關(guān)鍵技術(shù):成像系統(tǒng),圖像處理,特征檢測(cè),特征識(shí)別,特征分類(lèi),視覺(jué)伺服等。
【科研團(tuán)隊(duì)】
機(jī)器視覺(jué)檢測(cè)與自動(dòng)化中心由香港科技大學(xué)、上海交通大學(xué)和上海大學(xué)的專(zhuān)家學(xué)者共同組建,其中教授2名,副教授1名,視覺(jué)工程師8人。
【研究方向】
機(jī)器視覺(jué)檢測(cè)與自動(dòng)化中心發(fā)揮自身的技術(shù)優(yōu)勢(shì)專(zhuān)注于產(chǎn)品研發(fā)。目前,正在研發(fā)的產(chǎn)品有:
1、便攜式大場(chǎng)景光學(xué)三坐標(biāo)
針對(duì)車(chē)間現(xiàn)場(chǎng)對(duì)零部件高精度三維測(cè)量的需求,本產(chǎn)品通過(guò)高品質(zhì)的相機(jī)成像系統(tǒng)和不同類(lèi)型無(wú)線測(cè)頭的組合,構(gòu)成了便攜式3D測(cè)量解決方案,能夠勝任以下任務(wù):1)隱蔽點(diǎn)及隱蔽幾何特征的三維測(cè)量;2)自由曲面的三維測(cè)量;3)空間多點(diǎn)的三維動(dòng)態(tài)跟蹤測(cè)量。典型應(yīng)用領(lǐng)域包括:在機(jī)床上對(duì)大型薄壁件進(jìn)行三維測(cè)量、飛機(jī)工裝、夾具的檢測(cè);大型葉片的葉型測(cè)量、大型鑄造零件的測(cè)量、大型船體模具的測(cè)量;機(jī)器人重復(fù)定位精度的檢測(cè)、機(jī)器人空間運(yùn)動(dòng)軌跡的測(cè)量。
2、機(jī)器人3D視覺(jué)引導(dǎo)的散堆件拾取系統(tǒng)
3D視覺(jué)引導(dǎo)系統(tǒng)能夠感知3D工作場(chǎng)景,定位目標(biāo)工件,確定機(jī)器人操作位置和軌跡,提升機(jī)器人的柔性和可靠性,幫助機(jī)器人勝任更復(fù)雜的工作(自動(dòng)化組裝、材料處理、裝配等)。機(jī)器人3D視覺(jué)引導(dǎo)系統(tǒng)與傳統(tǒng)的人工示教和復(fù)雜的工件定位裝置相比,大大提升了生產(chǎn)效率,降低了成本。該系統(tǒng)能夠勝任以下任務(wù):1)拆垛:不局限于單一尺寸產(chǎn)品固定擺放規(guī)律的拆垛任務(wù),即使對(duì)于不同尺寸無(wú)固定規(guī)律的產(chǎn)品拆垛亦可自動(dòng)識(shí)別定位;2)箱柜取放,零件散亂堆放的箱柜,實(shí)現(xiàn)任意形狀工件的三維識(shí)別,即使存在遮擋、姿態(tài)移動(dòng)也可高速、高精度的識(shí)別;3)上下料,可對(duì)任意形狀姿態(tài)的零件進(jìn)行排序、安放。
更多信息請(qǐng)見(jiàn)科研成果。
3、工業(yè)機(jī)器人位姿測(cè)量與標(biāo)定系統(tǒng)
目前,機(jī)器人應(yīng)用于自由曲面加工的需求愈加突出,例如:葉片機(jī)器人磨削,船用螺旋槳的機(jī)器人銑削。與傳統(tǒng)點(diǎn)位加工不同,復(fù)雜曲面產(chǎn)品制造具有結(jié)構(gòu)復(fù)雜、性能指標(biāo)精度高、連續(xù)軌跡運(yùn)動(dòng)等特點(diǎn),對(duì)工業(yè)機(jī)器人的結(jié)構(gòu)、性能、動(dòng)作流程和可靠性等都提出了更高的要求。特別是在絕對(duì)軌跡精度方面,串聯(lián)式的工業(yè)機(jī)器人的結(jié)構(gòu)安裝誤差和加工剛性都帶來(lái)了加工過(guò)程的軌跡精度下降,因此位姿測(cè)量與標(biāo)定系統(tǒng)對(duì)保證制造過(guò)程精度具有重要意義。
系統(tǒng)組成:硬件:該系統(tǒng)的主要硬件有:兩個(gè)工業(yè)相機(jī)(如圖1(a)),主動(dòng)光立體標(biāo)靶(如圖1(b)),工控機(jī)(如圖1(c)),標(biāo)定標(biāo)靶(相機(jī)標(biāo)定標(biāo)靶+特征標(biāo)靶,如圖1(d))。軟件:標(biāo)定,測(cè)量及機(jī)器人控制軟件平臺(tái)(手眼標(biāo)定,立體標(biāo)靶標(biāo)定,系統(tǒng)測(cè)量精度評(píng)價(jià),測(cè)量測(cè)試,圖像采集及測(cè)量,機(jī)器人控制)如圖2所示。測(cè)量深度范圍:500mm~3000m,測(cè)量視場(chǎng)見(jiàn)表1。該系統(tǒng)能夠勝任以下任務(wù):1)機(jī)器人位置姿態(tài)的實(shí)時(shí)測(cè)量;2)機(jī)器人視覺(jué)伺服;3)機(jī)器人參數(shù)標(biāo)定;4)機(jī)器人軌跡姿態(tài)性能特性評(píng)定。
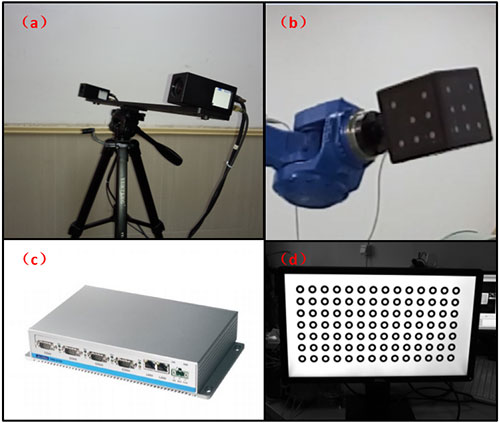
圖1 系統(tǒng)硬件組成
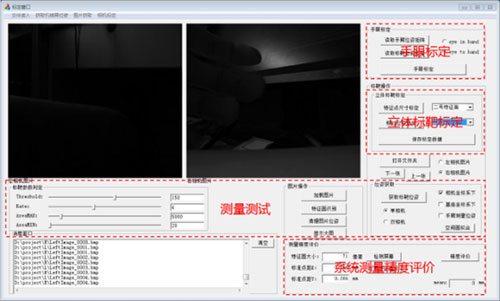
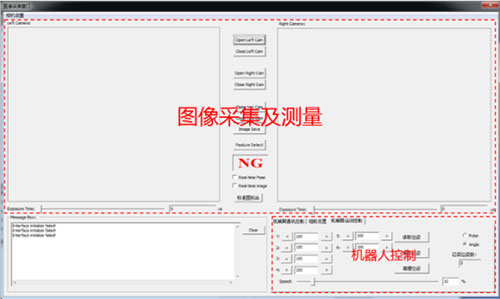
圖2 軟件平臺(tái)界面
|
測(cè)量距離/m |
視場(chǎng)大小 |
測(cè)量距離/m |
視場(chǎng)大小/mm |
|
0.5 |
408*552 |
2.0 |
1631*2206 |
|
1.0 |
816*1103 |
2.5 |
2038*2782 |
|
1.5 |
1223*1656 |
3.0 |
2446*3312 |
表 1 相機(jī)視場(chǎng)范圍
